Title Matrix
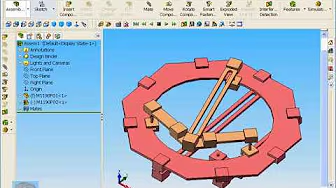
Montaje del mecanismo de 1190 del atlas Artobolevski con Solidworks y Cosmos Motion.
poliMedia UPV
MovieBox سے آگے بھی entertainment picks
ہم casual games اور short drama پسند کرنے والوں کے لیے partner destinations بھی دکھاتے ہیں۔ کسی بھی تجربے کو ایک ٹیپ میں کھولیں۔
آپ کو یہ بھی پسند آ سکتا ہے
SEAS Videos
Signal in catalog
IELTS Listening and Speaking Sections Skills Mastery
Signal in catalog
Complete Maths - Mindmap Revision For JEE 2023
Signal in catalog
Special Videos
Signal in catalog
Excel Basics for Data Analysis
Signal in catalog
SEAS Graduate Students
Signal in catalog
Complete Class 11 + JEE CHEMISTRY - JEE Mind Map
Signal in catalog
The Only Price Action Trading Video You Will Ever Need
Signal in catalog
Data Science Methodology
Signal in catalog
Bebefinn Best Kids Songs and Nursery Rhymes 🎵
Signal in catalog
Kids Songs & Nursery Rhymes | CoComelon, Blippi & Little Angel
Signal in catalog
HTML and CSS in depth
Signal in catalog
Toddlers & PreK Learning
Signal in catalog
Introduction to HTML, CSS, & JavaScript
Signal in catalog
Yoga Time with VOLT
Signal in catalog
Introduction to Data Analytics
Signal in catalog
Top of the Blocks
Signal in catalog
Science Trek
Signal in catalog
Reggae
Signal in catalog
Learn to Read for Kids
Signal in catalog
Kisan Mela 2025
Signal in catalog
ABCs, 123s, and MORE with Sesame Street and The Children's Kingdom Nursery Rhymes
Signal in catalog
English Advanced C1
Signal in catalog
Negeri 5 Menara
Signal in catalog
تبصرے
6 تبصرے
Título: Montaje del mecanismo de 1190 del atlas Artobolevski con Solidworks y Cosmos Motion. Tramo 06 de 06 Descripción: TRAMO 06 DE 06 - ELIMINACION ULTIMA RESTRICCION EN EXCESO, COMPROBACION MOVIMIENTO Y VISUALIZACION TRAYECTORIA PUNTO TRAZADOR - En este último tramo de la presentación vamos a terminar de eliminar las restricciones en exceso. Simularemos el modelo cinemático creado bajo la gravedad, actuando en la dirección mas adecuada, con el fin de comprobar que la configuración de pares cinemáticos elegida permite el movimiento que tiene que tener el mecanismo, y por último visualizaremos la trayectoria trazada por el punto trazador, comprobando que coincide con al del Atlas del Profesor Artobolevski. Redefinimos uno de los pares y comprobamos la movilidad resultante. Es correcta, pero es necesario comprobar además si el movimiento que puede tener el mecanismo es el adecuado. Definiremos la gravedad actuando en dirección del eje Y negativo. Comprobando seguidamente el movimiento
Título: Montaje del mecanismo de 1190 del atlas Artobolevski con Solidworks y Cosmos Motion. Tramo 05 de 06 Descripción: TRAMO 05 DE 06 - INSERCION EN EL MODELO "COSMOS MOTION" DE LA ULTIMA PIEZA E INICIO DE LA ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo CM la última pieza, crearemos sus correspondientes pares cinemáticos con el resto de las piezas del modelo, y los comenzaremos a redefinir para eliminar las restricciones en exceso. Al insertar en el modelo la última pieza, aparece visible el icono que representa su centro de masas. Empezamos a definir sus pares. Definimos su primer par prismático. La movilidad total se reduce. Procedemos a definir el siguiente par prismático. La movilidad total de nuevo se ha reducido, pero además han aparecido restricciones en exceso. Solo queda por definir un par giratorio. Lo definimos y luego comenzaremos a redefinir los pares existentes para eliminar todas las restricciones en exceso. Comprobamos la movili
Título: Montaje del mecanismo de 1190 del atlas Artobolevski con Solidworks y Cosmos Motion. Tramo 04 de 06 Descripción: TRAMO 04 DE 06 - INSERCION EN EL MODELO "COSMOS MOTION" DE TRES PIEZAS - Seguimos insertando piezas en el modelo cinemático en CM. En este tramo vamos a insertar tres piezas, redefiniendo adecuadamente los pares cinemáticos para evitar las restricciones en exceso. A veces tendremos que definir en alguna pieza geometría adicional, para poder ubicar adecuadamente los iconos de los pares cinemáticos. Se observa como se puede definir un punto en el centro de una circunferencia de la pieza base. Punto que nos va permitir ubicar adecuadamente el icono del par cinemático que vamos a crear. Seguidamente procedemos a insertar en el modelo cinemático la piezas 02. Vemos el icono que representa el centro de masas de la pieza que acabamos de insertar. Comprobamos que la movilidad total es de 6 unidades superior a la última vez que la calculamos. Procedemos a definir un par cinem
Título: Montaje del mecanismo de 1190 del atlas Artobolevski con Solidworks y Cosmos Motion. Tramo 03 de 06 Descripción: TRAMO 03 DE 06 - FINALIZACION MODELO SOLIDWORKS E INICIO MODELO "COSMOS MOTION" - En este tramo vamos a finalizar el modelo Solidworks (SW) e inicial el modelo cinemático en "Cosmos Motion" (CM). Comenzamos revisando la ubicación de la última pieza, visualizando el video disponible. Comenzamos su inserción en el modelo SW. Tenemos que definir las "mates" necesarias. En primer lugar definimos las necesarias para situar la pieza en la ranura de la pieza base o fija. Con dos "mates" del tipo coincidencia de superficies será suficiente. Seguidamente definimos una "mate" del tipo superficies cilíndricas concéntricas. Con lo que terminamos el modelo en SW. Comprobamos el movimiento del mecanismo. Al no haber definido "mates" que limiten el movimiento de las deslizaderas en las guías, las piezas se mueven mas allá de los límites físicos del modelo real. Un vez guardado el m
Título: Montaje del mecanismo de 1190 del atlas Artobolevski con Solidworks y Cosmos Motion. Tramo 02 de 06 Descripción: TRAMO 02 DE 06 - INSERCION EN EL MODELO SW DE DOS PIEZAS - Seguimos insertando piezas en el modelo SW, definiendo las correspondientes "mates". Primero comprobamos donde ubicarlas, revisando la animación disponible. Procedemos a insertar la pieza seleccionada. Se trata de la piezas tres. Hemos de insertarla en una ranura. Definimos en primer lugar una "mate" coincidencia de superficies. Y en segundo lugar, otra "mate" del mismo tipo. Con lo que tenemos la pieza insertada en la ranura. Comprobamos el movimiento relativa resultante. Seguidamente procedemos a revisar la animación de referencia disponible, para decidir que nueva pieza insertar. Colocamos alguna de las piezas en posición y procedemos a insertar la pieza seleccionada. Tenemos que insertar una parte de la pieza en la ranura correspondiente. Definiremos por tanto dos "mates" del tipo coincidencia de superfic
Título: Montaje del mecanismo de 1190 del atlas Artobolevski con Solidworks y Cosmos Motion. Tramo 01 de 06 Descripción: TRAMO 01 DE 06 - INSERCION EN EL MODELO SW DE LAS TRES PRIMERAS PIEZAS - Partimos de la información sobre el mecanismo disponible en el Atlas de Mecanismos de Artobolevski. Disponemos adicionalmente de una animación del movimiento del mecanismo realizada con un programa de simulación de mecanismos planos, el Working Model 2D. Disponemos de las piezas necesarias creadas en Solidworks (SW) por el autor, y de una animación del mecanismo donde se puede ver como se mueven entre ellas. Pretendemos crear un modelo cinemático en "Cosmos Motion" (CM) para poder comprobar la curva trazada por el punto trazador. Modelo cinemático creado de tal manera que no existan restricciones en exceso. Comenzamos creando un nuevo montaje en SW. Insertamos la primera pieza. Insertamos la segunda. Tenemos que definir las relaciones de posición, denominadas "Mates" en este versión de SW, para